
Background
With the continuous emergence of technological breakthroughs, we are being pushed closer into the 4th Industrial Revolution which may represent a new stage in organisation and control in industry.
The 4th Industrial Revolution (4IR), also referred to as Industry 4.0, is defined as the fusion of advances in technology that amalgamate the physical, digital and biological worlds. Examples of such technologies would include artificial intelligence, robotics, Internet of Things, 3D printing, quantum computing and cyber-physical systems.
At John Thompson there is a drive to incorporate cyber-physical systems and more advanced control within current boiler systems and business practices. With interest in exploring systems that have a more practical function, there have been two control systems that have been explored and implemented for testing.
Model predictive control (MPC)
Model predictive control (MPC) is an advanced control algorithm that has the objective of forecasting the system’s behaviour. It attempts to follow a specific pattern through manipulation of output variables.
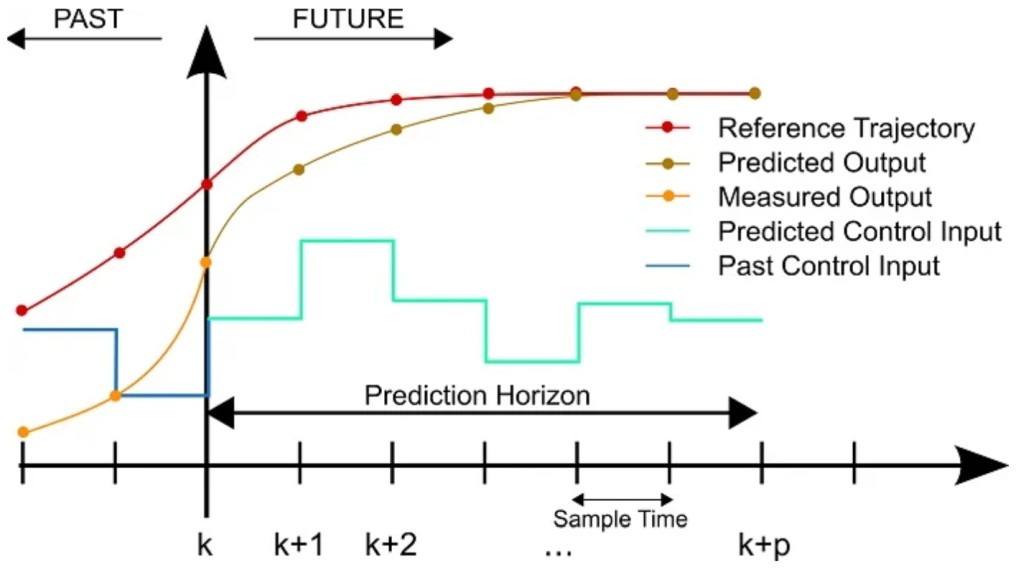
Figure 1: Graphic of the prediction horizon
The MPC will map out the timeline of the system for a predetermined number of time steps. This is known as the prediction horizon. Using the prediction horizon (Figure 1) the controller will change the output variables to guide the system to closely follow the desired reference. The MPC will do this evaluation at every time step to ensure more stability to disturbances.
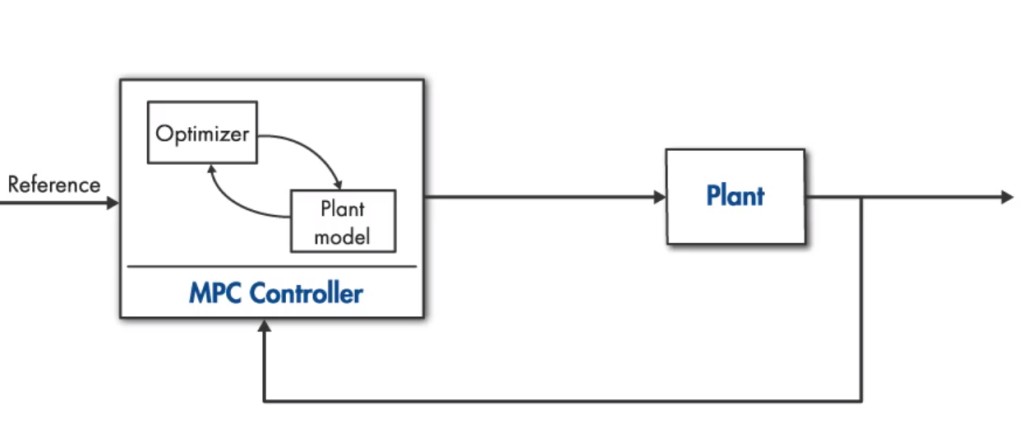
Figure 2: Architecture of the MPC
Figure 2 shows the architecture of the MPC. The plant model shown is a dynamic environment of the actual plant.
This is where the abovementioned prediction horizon is carried out and it allows the MPC to simulate the state of the actual model. In order to ensure that the plant model mimics the behaviour of the actual plant, a cost function is used. The cost function quantifies the margin between the plant model and the actual plant. The optimiser component is used to reduce this margin as far as possible by changing the plant model till the lowest cost is obtained.
The MPC methodology is very effective at exploiting the plant’s dynamics and with the advantage of being generic can be expanded over a wide range of applications. However, like all complex algorithms, an MPC controller requires high computational power and is not suitable for cost effective microelectronics.
World models algorithm (WMA)
Figure 3 is a diagram of the world models algorithm (WMA), which is a suggested solution for generating a virtual environment of the actual environment.
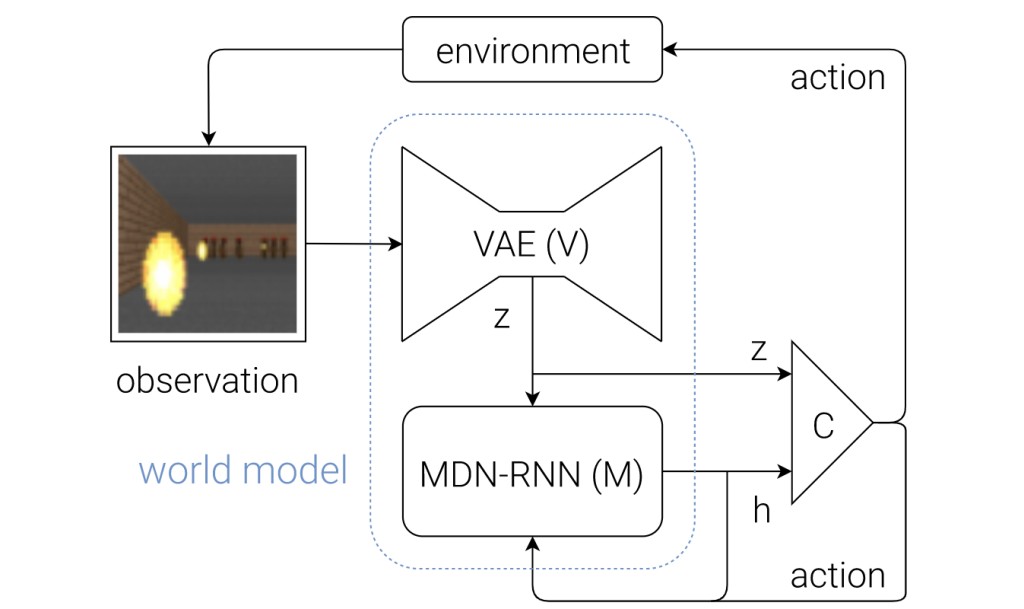
Figure 3: World models algorithm (WMA).
The reason the WMA has the ability to generate a virtual environment lies within its architecture, which is built up from a combination of powerful machine learning concepts.
The first component of the control flow is known as the variational autoencoder (VAE) and its job is to take packets of observation data and convert them into a more condensed form. This is very useful since input data, especially if it is visual data, comes in with high dimensions which are often not practical as inputs to other parts within the control flow.
The next component in the control flow is known as the MDN-RNN which is a combination of a mixed density network and a recurrent neural network.
This component is the memory component of the model and stores the generated virtual environment. The purpose of the MDN-RNN is to provide the future state of the environment to the controller.
The final component in the control flow is the controller. Its function is to combine the observation data from the VAE and the future state data from the MDN-RNN and provide an action that will give the desired reference. The control method used within the controller can be whatever the developer desires.
The ability of the WMA to mimic an environment based on observation data has proven to be fairly accurate. In addition, one of the greatest strengths of the WMA is that once the virtual environment has been generated the controller can be trained offline.
Practical implementation
In most cases it is difficult to determine whether a control scheme will be more or less effective without testing it in a practical application.
The boiler house at Lentegeur Psychiatric Hospital has a 10t/h coal package boiler. The stream flow output remains quite steady during operation, making it an ideal system to test control schemes without interfering in operations.
Each control system was given the damper positions as control handles and given the objective to control the O2 level at a specified reference. Doing this in turn should improve the combustion and improve the boiler’s efficiency. Both control systems were shown to improve the stability of the O2 levels around the reference point. The increased stability is a promising outcome leading to improved efficiency within the boiler.
Currently there are plans to further the exploration by adding more control handles and adding features such as online learning.
By Christopher van den Berg, Cyber-Physical Systems Engineer John Thompson
![]()